


Liste des aides à la conduite : tous les dispositifs expliqués
- Détection d'angle mort
- Régulateur adaptatif
- Détection de franchissement de ligne
- Parking automatique
- Pilotage automatique
- Freinage automatique / Brake assist
- Eclairage des virages/phares directionnels
- Feu de route automatiques ou Matrix Led
- Détecteur de fatigue
- Lecture de la route
- Lecture des panneaux
- Alerte de franchissement de la vitesse autorisée

 1
1
De plus en plus courantes et même obligatoires, les aides à la conduite restent pour certaines un mystère pour une catégorie d'automobilistes. Essayons donc de les lister et d'expliquer brièvement leur manière de fonctionner.
Accès rapide :
- Détection d'angle mort
- Régulateur adaptatif
- Détection de franchissement de ligne
- Stationnement automatique
- Autopilot
- Assistance au freinage d'urgence EBA (à ne pas confondre avec l'AFU / Aide au freinage d'urgence)
- Eclairage directionnel intelligent
- Feux de route automatiques / Matrix Led
- Amortissement piloté adaptatif par lecture de la route
- Détecteur de fatigue
- Lecture des panneaux
- Alerte de franchissement de la vitesse autorisée
A lire : chronologie des aides à la conduite obligatoires sur les voitures neuves
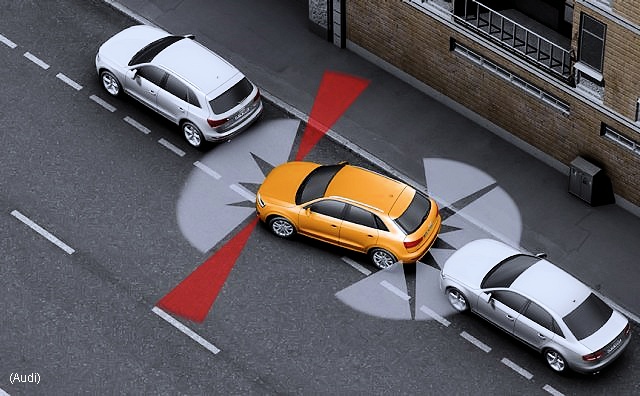
Détection d'angle mort

Comme le radar de recul, le détecteur d'angle mort emploie un sonar. Le principe est donc d'envoyer une onde et d'attendre son écho afin de pouvoir en déduire la distance de l'objet. Connaissant la vitesse de l'onde émise, il suffit alors de chronométrer son aller retour pour en déduire la distance (distance qui sert pour le radar de recul, et pas vraiment le détecteur d'angle mort qui est binaire : soit il y a un objet, soit il n'y en a pas). Le système est donc composé de sonars et d'un calculateur. Le sonar a comme fonction d'envoyer et de recevoir les ondes et le calculateur de traiter les données afin d'avoir un résultat compréhensible par un humain. En l'occurrence, il s'agira ici d'allumer un voyant sur le rétroviseur pour signaler qu'il y a quelque chose dans le champs du sonar (dirigé pour l'occasion vers les côtés, ou plutôt les angles morts).
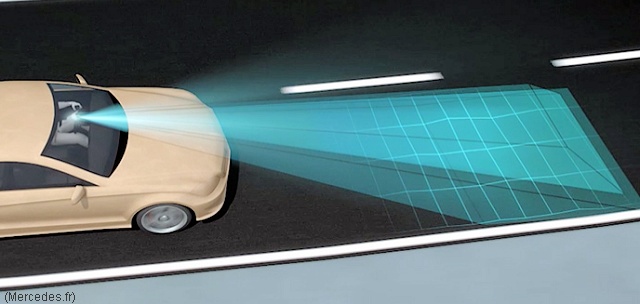
Régulateur adaptatif
.jpg)
Encore une fois, cet équipement découle de la combinaison d'un sonar/radar (la différence se situe au niveau du type d'onde envoyée, mais le principe reste le même pour les deux technologies) et d'un calculateur. Le sonar est ici placé dans le museau de l'auto, un peu plus en hauteur que les sonars de stationnement. Sa puissance est aussi supérieure car on doit pouvoir détecter ici des objets à plus de 50 mètres, et non pas quelques centimètres dans la cas d'un radar de recul. Le principe est donc identique que le radar de recul mais avec une échelle supérieure. Le radar envoie continuellement des ondes vers l'avant en captant celles qui sont réfléchies (qui ont donc croisé un obstacle). Il suffit alors encore une fois de chronométrer le temps que met une onde pour faire l'aller retour pour connaître sa distance.

Quand je sélectionne une distance de 50 mètres entre moi et le véhicule de devant, le calculateur module alors l'accélérateur (il joue alors sur le régulateur de vitesse) pour rester à 50 mètres de distance. Le calculateur fait constamment des corrections pour que les 50 mètres soient respectés au maximum.
En gros, le radar représente les yeux, le calculateur le cerveaux et le régulateur (pilotage injection / papillon) les jambes de l'auto.
Détection de franchissement de ligne
Ici on ne pourra pas compter sur le radar/sonar ... Car une ligne n'a pas de relief.
De ce fait, plusieurs méthodes sont utilisées par les constructeurs. Certains utilisent des rayons infrarouges : quand ils reflètent sur une ligne blanche cela renvoie un signal lumineux caractéristique (non visible par l'oeil humain) qui est alors reconnu par le dispositif récepteur (il y a donc un dispositif pour l'émission de la lumière infrarouge et un autre pour la réception). Les données sont alors traitées par un calculateur pour les rendre cohérentes.
Dans ce cas là, on peut dire que cela ressemble au système basique de radar, sauf qu'ici c'est une onde lumineuse qui est utilisée et non pas une onde sonore (car la lumière, c'est aussi une onde même si elle est plus sophistiquée et mystérieuse que le celle du son). Et ici on ne détecte pas un relief mais un type de surface particulier (la bande blanche).

D'autres utilisent des caméras, dont les images filmées sont traitées par des algorithmes qui ont été nourris avec du machine learning. Les contraste des images (que vous ne verrez jamais ...) est généralement accentué pour simplifier l'image et donc réduire le temps de calcul.
Certains combinent les deux pour accroître la fiabilité de l'ensemble (pas la fiabilité en terme de résistance, mais en terme de fonctionnement).
Parking automatique
Le système automatique de stationnement combine quant à lui beaucoup d'éléments ... En réalité, à force d'équiper les voitures de divers systèmes, les constructeurs se sont rendu compte qu'ils pouvaient les centraliser pour pouvoir faire faire de nouvelles choses à votre auto.
En effet, pour cela il me faut cette liste d'ingrédients :
- Une direction électrique (ou à assistance électrique) pour que le calculateur puisse tourner le volant sans moi
- des radars de recul + radar d'angle mort pour que la voiture puisse connaître l'environnement qui l'entoure (ça devient les yeux de l'auto)
- Un calculateur pour pouvoir traiter les données acquises (radar) et agir (direction électrique+accélérateur)
Pilotage automatique

Le pilotage automatique combine le maintient dans la ligne et le régulateur adaptatif dans le cas de la conduite autonome de niveau 2 (qui est le niveau maximum qu'on retrouve dans les voitures bien que de très rares modèles aient réussi à passer au niveau 3).
Pour cela il fallait aussi comme ingrédient :
- Un accélérateur sans câble (ça fait un bail que ça n'existe plus, je sais ...), donc une injection électrique / électronique (qui pourra donc être contrôlée par le calculateur, ce qui permettra à la voiture d'accélérer sans avoir besoin de vous)
- Il faut un AFU (Aide au freinage d'urgence) qui permet à la voiture de freiner sans vous grâce à un piston électrique au niveau du maître cylindre (mieux, il existe désormais des freinages par fil / sans lien physique qu'on appelle By Wire). Il se déclenche normalement quand la voiture détecte que vous avez une frayeur (manière dont vous pressez la pédale) mais que vous n'appuyez pas assez fort sur le frein. Le but est de vous aider à freiner plus court et surtout d'accentuer le freinage (car les ingénieurs ont remarqué que les gens n'osaient pas appuyer assez fort en cas d'urgence, de peur de bloquer les roues ... L'humain a donc un ABS naturel en lui ! Sauf qu'il est peu efficace)
.jpg)
Grossomodo, la voiture a un maximum de capteurs divers et variés pour qu'elle (le calculateur) puisse être au courant de tous les éléments qui composent son environnement. De ce fait, c'est la combinaison de sonars, radars, diodes infrarouges, caméras et position GPS qui permettent au calculateur de connaître son environnement. A partir de cela, il va influer sur le volant (direction électrique), l'accélérateur (contrôlé par électronique) et les freins (AFU) pour vous enmerner d'un point A à un point B. Mercedes a déjà fait rouler une Classe S en Allemagne sur plus de 100 km, en passant par des petites routes et villages. Elle s'en est sortie sans soucis, bluffant !
Freinage automatique / Brake assist

Une fois que vous aurez vu les paragraphes du haut, vous devinerez aisément comment cela fonctionne. Comme le régulateur adaptatif, l'auto contrôle en permanence via un radar/sonar la distance du véhicule de devant. Si il s'approche trop (quand la vitesse d'approche est trop rapide), le calculateur le détecte et active l'AFU (pression du frein à fond qui sera par la suite modulé par l'ABS qui empêche le blocage de roues. Car il faut pouvoir freiner le plus fort possible sans avoir à bloquer les roues).
Ce dispositif s'est étendu et il fonctionne désormais même en marche arrière chez certaines marques. Sortir d'une place de parking en arrière n'a donc jamais été aussi sécurisant !

Eclairage des virages/phares directionnels

Plusieurs systèmes existent. Les plus basiques allument un des deux anti brouillard quand vous tournez le volant (un bricolage électronique à trois francs six sous qui permet de fabriquer de nouveaux équipements, parfait pour le marketing !). Si vous tournez vers la gauche, l'antibrouillard de gauche s'allume pour éclairer un peu mieux l'intérieur du virage. D'autres, plus évolués, fonctionnent en duo avec le GPS qui permet alors de connaître les virages de manière précise. Et si certaines voitures grand public n'allument qu'un de leurs antibrouillards, d'autres voitures ont des phares mobiles qui se dirigent vers la direction du virage.
Feu de route automatiques ou Matrix Led

Ici, seule une caméra pourra permettre au calculateur de voir son environnement (la position GPS peut aussi aider au calculateur de mieux comprendre son environnement proche). Les images prises sont analysées par un algorithme (le programme installé dans le calculateur) qui va alors se borner à chercher des paires de phares. Selon ces données, l'inclinaison des feux et le nombre de led allumées seront adaptés afin que le rayon lumineux ne soit jamais dirigé vers la voiture d'en face (et donc éviter de l'éblouir). Quand il n'y a personne, la voiture reste en plein phare, de manière basique. Ce système est d'ailleurs assez impressionnant à voir à l'oeuvre.
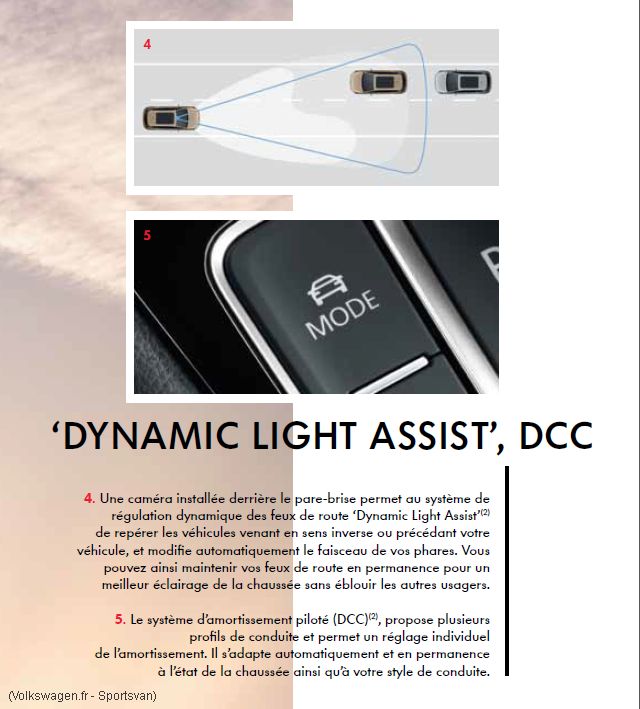
Il y a donc deux dispositifs, celui qui commute phares / plein phares (feux de route) automatique et l'éclairage matriciel qui consiste à être toujours en plein phare sans éclairer les zones où il y a d'autres usagers pour ne pas les éblouir.
Détecteur de fatigue

Encore une fois, c'est une caméra (un peu intrusive ...) connecté à un calculateur qui permettra de détecter votre fatigue. Dans le paragraphe précédent, on a vu qu'elle cherchait à trouver des paires de phares. Ici c'est un peu pareil sauf qu'elle va chercher à trouver une paire d'yeux (elle l'a appris par machine learning). Une fois détectés, le rythme de clignement est analyser par l'algorithme. Quand ce dernier montre des signes de fatigue (variables intégrées dans le programme informatique, un calculateur n'est pas intelligent, il ne fait que refaire ce qu'on lui apprend, ou plutôt ce qu'on lui programme ou apprend), une alerte est envoyée. Cette dernière se matérialise par un affichage sur votre tableau de bord ou alors par un son ou même des vibrations dans le volant ou le siège.
Toutes les deux heures elle s'allume aussi automatiquement pour conseiller de faire une pause.
Lecture de la route
Le but ici est de connaître à l'avance ce que réserve la route pour que la voiture agisse en conséquence. Ici, c'est Mercedes qui a de l'avance avec deux systèmes majeurs (DS utilise aussi ce dispositif) :
- Détection de l'état de la route (ex : Magic Body Control): un radar arrive à percevoir à l'avance que l'on va rouler sur une portion de route en mauvais état. Quand cela est détecté par des caméras (qui scannent continuellement la route), la suspension pneumatique es calibrée à la volée pour limiter au maximum les remous. Il faut donc un véhicule équipé d'une suspension active/pneumatique. Ce système existe sur les Classe S et Classe S coupé.
- Détection des virages par le biais du GPS (ex : Active Curve System). Quand un virage est en approche, la voiture se prépare à se pencher sur un côté afin de compenser l'inertie engendrée par la courbe (comme avec certains trains !). Il faut donc encore une fois une suspension pneumatique.
Lecture des panneaux

Utilisant des caméras et un logiciel intelligent, ce dispositif détecte et interprète les panneaux routiers, comme les limites de vitesse ou les interdictions de stationnement (tout cela par machine learning encore une fois, les formes ont été apprises en amont par le programme en lui faisant "ingérer"des milliers d'images), et les affiche sur le tableau de bord ou l'écran du véhicule.
Alerte de franchissement de la vitesse autorisée
Ce dispositif se greffe à celui qu'on vient de décrire juste avant et devient obligatoire à partir de 2022. Il ajoute donc une alerte à chaque franchissement de vitesse et va même parfois jusqu'à rendre la pédale dure ou limiter la puissance !
Bien que conçu pour augmenter la conscience du conducteur et renforcer la sécurité routière, ce système peut parfois s'avérer problématique. Les alertes fréquentes, en particulier dans les zones où la signalisation est dense ou change rapidement, peuvent devenir distrayantes. De plus, la fiabilité de la reconnaissance des panneaux n'est pas infaillible, menant parfois à des informations erronées qui peuvent semer la confusion chez le conducteur.
Sachez enfin qu'il se réactive automatiquement à chaque redémarrage ...
Ces articles pourraient vous intéresser :
- BUGS et dysfonctionnements des aides à la conduite / autopilot
- Liste des aides à la conduite des véhicules modernes
Ecrire un commentaire

Sondage au hasard :
Combien vous a coûté votre dernière révision ?
© CopyRights Fiches-auto.fr 2025. Tous droits de reproductions réservés.
Nous contacter - Mentions légales
Fiches-auto.fr participe et est conforme à l'ensemble des Spécifications et Politiques du Transparency & Consent Framework de l'IAB Europe. Il utilise la Consent Management Platform n°92.
Vous pouvez modifier vos choix à tout moment en cliquant ici.