


Fonctionnement du Multiplexage d'une voiture
- Utilité première du multiplexage
- Faisceaux ?
- Matérialisation d'un réseau multiplexé
- Les principaux protocoles de communication
- Controller Area Network (CAN)
- Local Interconnect Network (LIN)
- VAN
- FlexRay
- MOST (Media Oriented Systems Transport)
- Ethernet Automobile
- Du multiplexage au SDV : une évolution logique
- Une voiture qui devient un système informatique
- Les différentes manières de faire circuler l'information sur le réseau

 7
7.JPG)
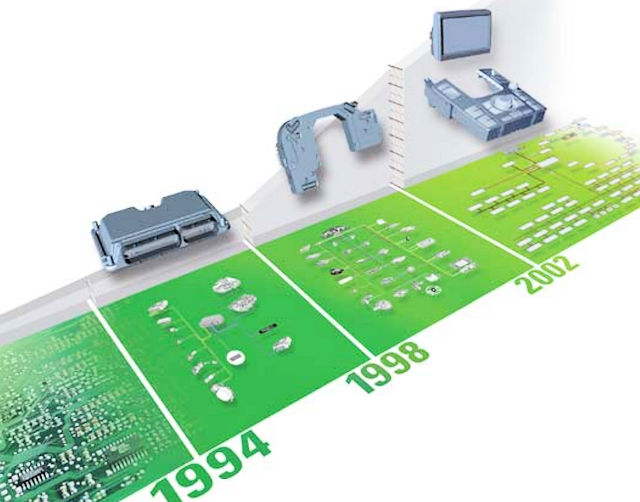
Le multiplexage a commencé à être adopté de manière massive dans les années 90. Cette évolution a été motivée par l'augmentation de la complexité et du nombre de fonctions électroniques dans les voitures, nécessitant une gestion plus carrée et centralisée des données et des commandes qui circulent dans les faisceaux.
Utilité première du multiplexage
À l'origine, les véhicules utilisaient des systèmes électriques relativement simples, avec un câblage direct et séparé pour chaque composant électrique. Cependant, avec l'avènement de technologies plus avancées, comme les systèmes de gestion moteur, les systèmes de sécurité actifs, l'informatique de bord et les dispositifs de confort, le besoin d'une méthode plus efficace pour gérer et faire transiter toutes ces fonctions est devenu évident.
Cette évolution a toutefois conduit à une accumulation de calculateurs, ce qui a progressivement poussé les constructeurs à repenser complètement l’architecture des véhicules, donnant naissance aux concepts de centralisation et de SDV.

.JPG)
Le multiplexage a fourni une solution en permettant de transmettre de multiples signaux de données à travers un seul câble ou réseau, réduisant ainsi le nombre de câbles nécessaires et simplifiant le système électrique du véhicule. Cette technologie a également permis une plus grande flexibilité dans la conception des systèmes électroniques des véhicules (on ajoute plus facilement un élément grâce à ce réseau), ainsi qu'une amélioration de la fiabilité et de la facilité de diagnostic des problèmes (OBD-II).
.JPG)
Les premiers systèmes multiplexés étaient relativement simples, mais avec le temps ils sont devenus beaucoup plus complexes et sophistiqués, intégrant des protocoles tels que CAN (Controller Area Network), LIN (Local Interconnect Network), FlexRay, et plus récemment, Ethernet.
SANS MULTIPLEXAGE
AVEC MULTIPLEXAGE
Le réseau multiplexé est à distinguer du circuit d'alimentation 12V qui alimente en énergie les différents composants. Le circuit multiplexé se limite à envoyer des informations binaires qui seront décryptées et attribuées aux organes destinataires, il n'est pas calibré pour faire circuler de hautes intensités électriques. Par exemple, un capteur ou un actionneur connecté au réseau LIN reçoit son alimentation électrique (énergie) directement à partir du système électrique 12V du véhicule, tandis que les instructions de commande et les données de retour transitent via le réseau LIN.
.JPG)
Le multiplexage consiste donc à installer un ou plusieurs réseaux normalisés (CAN, LIN etc.) informatiques dans la voiture. Au lieu de connecter les différents organes de leur emplacement jusqu'au calculateur ou boîtier de commande, avec chacun un câble, il suffit de joindre l'organe au réseau qui parcoure toute la voiture, exactement comme avec un réseau informatique dans une entreprise, il suffit de trouver la prise RJ45 la plus proche pour se connecter plutôt que de devoir tirer un câble entre votre PC et le serveur central.
L'autre avantage est que les différentes choses connectées au réseau multiplexé pourront aussi communiquer entre elles. Il s'agit donc d'une sorte d'autoroute où tout le monde peut échanger des informations.
.JPG)
Faisceaux ?
SI les faisceaux sont encore en grande majorité faits de fils de cuivre, la fibre optique va les remplacer petit à petit, ce qui permet d'améliorer le débit tout en économisant ce métal précieux qui se raréfie et qui est indispensable à n'importe quel générateur électrique.
Matérialisation d'un réseau multiplexé
Le réseau CAN utilise une paire de fils tordus, appelés CAN High et CAN Low. Ces deux fils fonctionnent ensemble pour transmettre et recevoir des informations. Les fils CAN High et CAN Low sont souvent tordus ensemble pour améliorer davantage la résistance aux interférences, une technique couramment utilisée dans les câbles de transmission données.
La méthode de communication dans un réseau CAN est différentielle, ce qui signifie que les signaux sont transmis par des différences de tension entre les deux fils. Cette approche aide à réduire les interférences et améliore la fiabilité de la communication, surtout dans un environnement sujet à de fortes perturbations électriques, comme une voiture.
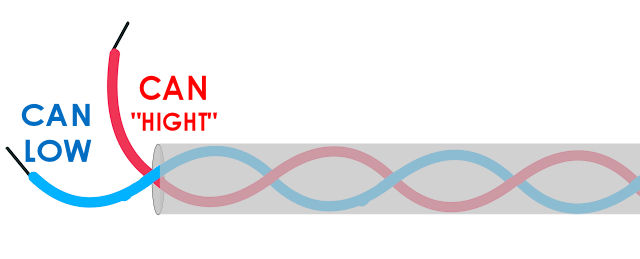
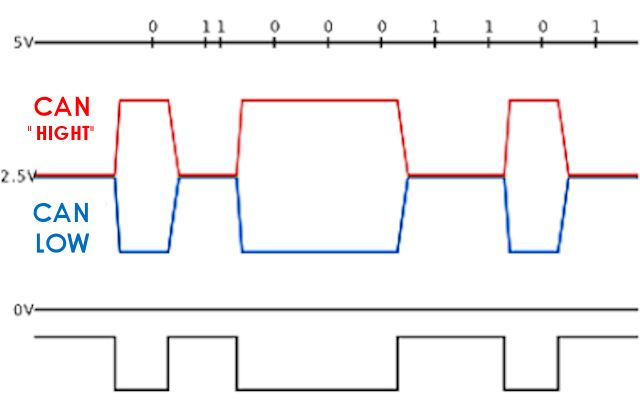
La communication sur le réseau CAN est bidirectionnelle, permettant aux différents modules connectés au réseau de communiquer les uns avec les autres dans les deux sens sur la même paire de fils.
Les principaux protocoles de communication
Controller Area Network (CAN)
C'est l'un des protocoles les plus répandus dans les véhicules pour la communication entre divers modules électroniques. Il est fiable, peut fonctionner dans des environnements à forte interférence électromagnétique et supporte une vitesse de communication modérée à élevée.
La tension typique pour les signaux sur un bus CAN est de 2,5 volts pour le niveau de repos (aucune communication), avec une différence de potentiel entre CAN High et CAN Low de 0 volt pour le bit dominant (logique 0) et environ 2 volts pour le bit récessif (logique 1).
Cependant, la tension du bus CAN ne doit pas être confondue avec la source d'alimentation du réseau, qui est souvent liée au système électrique 12V du véhicule.
Local Interconnect Network (LIN)
Il est souvent utilisé en complément du CAN pour connecter des capteurs et des actionneurs moins complexes et moins coûteux. Le LIN est plus simple et moins coûteux que le CAN, mais avec une vitesse de transmission plus faible.
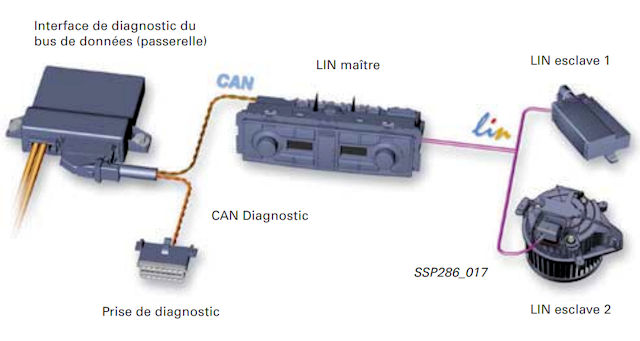
Le réseau LIN fonctionne généralement avec une tension de signal d'environ 12 volts, correspondant à la tension du système électrique du véhicule. Bien que le réseau LIN opère typiquement à une tension proche de celle du système électrique du véhicule (généralement 12 volts), cela ne signifie pas qu'il fournit l'énergie principale pour les composants connectés.
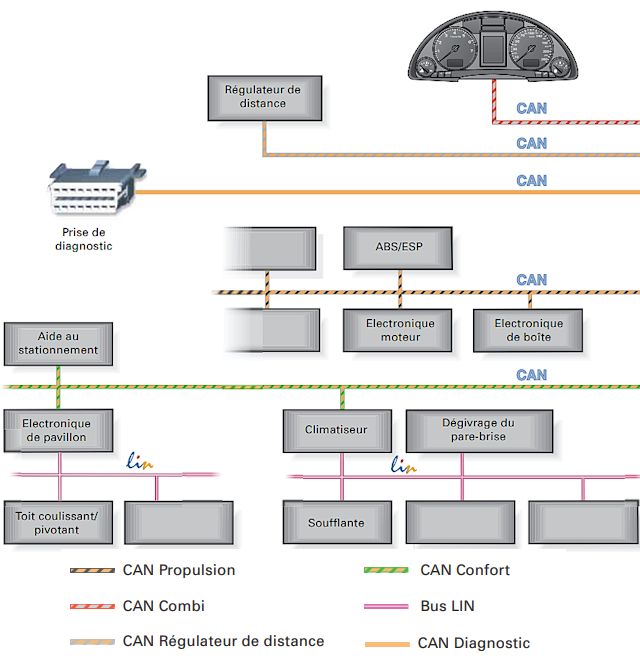
Le réseau LIN est un système de communication série simple et peu coûteux, principalement utilisé pour la gestion de petits actionneurs et capteurs. La plage de débit des données dans les systèmes LIN varie de 1 à 20 Kbits/s, une valeur qui est configurée via le logiciel des unités de contrôle LIN. Cette vitesse maximale est seulement un cinquième de celle atteinte par le réseau CAN Confort.
.JPG)
Les composants reliés au réseau LIN sont alimentés directement par le système électrique du véhicule (c'est-à-dire la batterie de servitude 12V ou le circuit électrique associé), et non par le bus LIN lui-même.
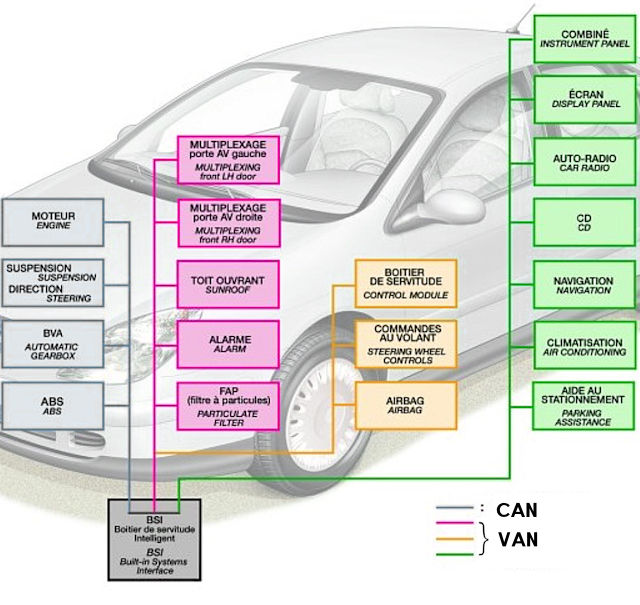
VAN
Le protocole VAN a été développé dans les années 1990, principalement par PSA Peugeot Citroën et Renault. Il est conçu pour supporter des communications à haut débit et est particulièrement efficace pour gérer des données nécessitant une transmission en temps réel. Ce protocole était particulièrement apprécié pour sa robustesse et sa capacité à gérer simultanément des données de nature diverse (par exemple, des commandes de signalisation et des données de capteurs). Avec le développement et l'adoption généralisée des protocoles CAN et LIN, qui offrent une plus grande flexibilité et une meilleure standardisation, l'utilisation du protocole VAN a diminué.
FlexRay
Il est utilisé pour des applications nécessitant une plus grande bande passante et une meilleure fiabilité que le CAN, comme le contrôle de châssis et les systèmes de freinage. Il supporte donc des débits de données élevés et offre une communication très fiable.
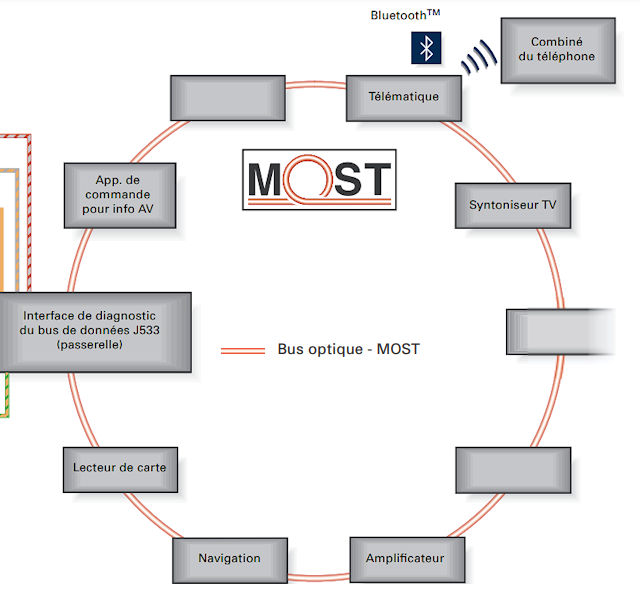
MOST (Media Oriented Systems Transport)
Il est principalement utilisé pour les systèmes de divertissement et de communication dans les véhicules. Il est donc conçu pour transférer des données audio et vidéo, supporte des débits de données très élevés.
Ethernet Automobile
Un peu comme le MOST, il est de plus en plus utilisé dans les véhicules modernes pour des applications nécessitant une transmission de données à très haut débit, comme les caméras de recul, la navigation, et la connectivité aux réseaux externes. Il fournit des vitesses de transfert de données beaucoup plus élevées comparées aux autres bus automobiles, permettant une meilleure intégration avec les technologies de l'information et de la communication.
Cette montée en débit n’est pas anodine, car elle accompagne directement l’émergence des architectures SDV. Là où le CAN plafonne à environ 1 Mbit/s, l’Ethernet automobile peut atteindre 1 Gbit/s voire plus, ce qui devient indispensable pour transporter les flux issus des caméras, radars ou lidars, qui peuvent générer plusieurs centaines de Mo par seconde. Le réseau ne sert alors plus seulement à échanger des ordres simples, mais à faire circuler de véritables flux de données massifs, comme dans un réseau informatique classique.
Du multiplexage au SDV : une évolution logique
Le multiplexage a permis de faire dialoguer une multitude de calculateurs entre eux, mais il repose sur une architecture très distribuée, avec un boîtier dédié à presque chaque fonction. Sur une voiture moderne, on peut ainsi dépasser les 80 calculateurs, chacun connecté au réseau CAN, LIN ou autre. Cette logique a longtemps fonctionné, mais elle atteint aujourd’hui ses limites en termes de complexité, de coûts et d’évolutivité.
C’est là qu’intervient le concept de SDV (Software Defined Vehicle). L’idée n’est plus simplement de faire communiquer les modules entre eux, mais de réduire leur nombre en regroupant les fonctions dans quelques calculateurs très puissants, voire un seul à terme. On passe donc d’une architecture éclatée à une organisation beaucoup plus centralisée, où le logiciel devient l’élément central qui pilote l’ensemble du véhicule.
Une voiture qui devient un système informatique
Avec le multiplexage, la voiture est devenue un réseau. Avec le SDV, elle devient un système informatique complet. Ce changement peut paraître subtil, mais il est en réalité assez profond. Avant, le matériel dictait les fonctions : chaque calculateur avait un rôle précis et difficilement modifiable. Aujourd’hui, le logiciel prend le dessus, ce qui permet de faire évoluer le véhicule dans le temps via des mises à jour à distance, un peu comme un smartphone.
Cette transformation s’accompagne aussi d’une montée en puissance du calcul embarqué. Les calculateurs centraux peuvent désormais atteindre plusieurs centaines de TOPS pour traiter les données issues des capteurs et des aides à la conduite. En parallèle, les architectures électriques évoluent, avec par exemple le passage progressif au 48V pour limiter les pertes et alimenter ces systèmes plus gourmands. Le multiplexage reste donc une base essentielle, mais il n’est plus la finalité, il devient une brique parmi d’autres dans une architecture beaucoup plus large.
Les différentes manières de faire circuler l'information sur le réseau
Le multiplexage temporel par paquets (Packet Time Division Multiplexing, PTDM) et le multiplexage fréquentiel (Frequency Division Multiplexing, FDM) sont deux méthodes de multiplexage utilisées pour transmettre plusieurs signaux sur un même canal de communication, mais elles fonctionnent de manière très différente. Voici une comparaison des deux :
Multiplexage Temporel par Paquets (PTDM)
Le PTDM implique la division du temps en segments ou tranches, chacun étant alloué à un signal différent. Les données sont transmises sous forme de paquets, et chaque paquet est identifié par une adresse ou un identifiant indiquant sa destination. On pourrait matérialiser ça par des wagons qui se suivent et qui doivent donc faire la queue en cas de ralentissement.
Multiplexage Fréquentiel (FDM)
Le FDM fonctionne en divisant la bande passante disponible en plusieurs bandes de fréquences distinctes, chaque bande étant allouée à un signal différent. Elles peuvent donc se chevaucher sans se coincer les unes envers les autres.
Superposition de Fréquences : les signaux sont transmis simultanément sur le même canal, mais chacun occupe une bande de fréquence différente. Cette technique est possible car les signaux sont modulés à différentes fréquences porteuses.
Différences Clés
Le PTDM est principalement utilisé pour les signaux numériques, tandis que FDM peut être utilisé pour les signaux analogiques et numériques.
Le PTDM utilise toute la bande passante pour chaque paquet pendant son intervalle de temps, alors que FDM répartit la bande passante en plusieurs bandes de fréquence plus étroites, utilisées simultanément.
Le FDM nécessite souvent des filtres de bande passante et des modulateurs/démodulateurs plus complexes, tandis que PTDM peut être plus simple en termes de traitement du signal, mais requiert une gestion efficace du temps et des paquets.
Le FDM peut être plus sensible aux interférences entre les canaux (interférence de canal adjacent), tandis que PTDM doit gérer les problèmes liés au timing et à la synchronisation des paquets.
En résumé, PTDM et FDM sont deux méthodes de multiplexage complémentaires qui servent à optimiser les flux de communication, mais elles diffèrent dans leur approche et leur application (d'où leur complémentarité et le choix de l'une ou l'autre selon l'application).
Ces articles pourraient vous intéresser :
- Blocage de l'OBD : quand les marques auto deviennent mafieuses ...
- Comment fonctionne une cartographie moteur ?
- Problème de voyants lumineux
- Évolution des interfaces numériques par écran dans l'automobile
- Les Clio et Mégane interdites à la vente en Allemagne
- Architecture SDV : quand la voiture devient un ordinateur
Ecrire un commentaire

Sondage au hasard :
Trouvez-vous l'entretien de votre auto trop cher ?
© CopyRights Fiches-auto.fr 2026. Tous droits de reproductions réservés.
Nous contacter - Mentions légales
Fiches-auto.fr participe et est conforme à l'ensemble des Spécifications et Politiques du Transparency & Consent Framework de l'IAB Europe. Il utilise la Consent Management Platform n°92.
Vous pouvez modifier vos choix à tout moment en cliquant ici.